Appendix
This appendix provides an overview of the physical principles that motivated the creation of this project and its relevance within the neuromorphic computing framework. It also includes a detailed description of the algorithm’s steps along with any modifications made to implement it in Python considering the non-idealities of the physical device. Finally, example output graphs are presented to help users verify the correctness of their results.
Neuromorphic Computing
Neuromorphic computing is an approach to designing hardware and software that mimics the structure and functioning of the human brain’s neural networks to improve energy efficiency and performance in tasks like pattern recognition and learning.
The key components of neuromorphic systems are synaptic-like devices, which emulate the behavior of biological synapses. These devices enable systems to replicate brain-like learning and adaptability by adjusting their “synaptic weights” based on experience, similar to how biological synapses strengthen or weaken connections through a process called synaptic plasticity.
Metal-Oxide Memristors Crossbars
Metal-Oxide Memristors are Spintronic devices which present a synaptic behavior after the application of identical Voltage pulses with sufficiently high amplitude. In particular, the synaptic weight is represented by the conductance of the device and, by sending a train of voltage pulses, it can be increased in a non-volatile way, emulating in this way the synapse potentiation happening in the human brain. Also, after the conductance change, it’s possibile to return to the previous state by applying a voltage pulse of opposite polarity, emulating so the synapse depression process [Fig2.a].
It is so possible to build integrated circuits formed by memristors arranged in a crossbar configuration which play the role of simple neural networks and can learn tasks for neuromorphic computing applications.
In the present work, we take a 4x4 memristor crossbar circuit to which we associate a single-layer perceptron architechture with two neurons, capable of recognizing the set of patterns in Fig2.b.
In the physical picture, the 4-bit patterns are represented by 2 distinct values of voltage which represent the “0” and “1”, the synaptic weights are associated with the conductances of the memristors while the neural network outputs are connected with the output currents.
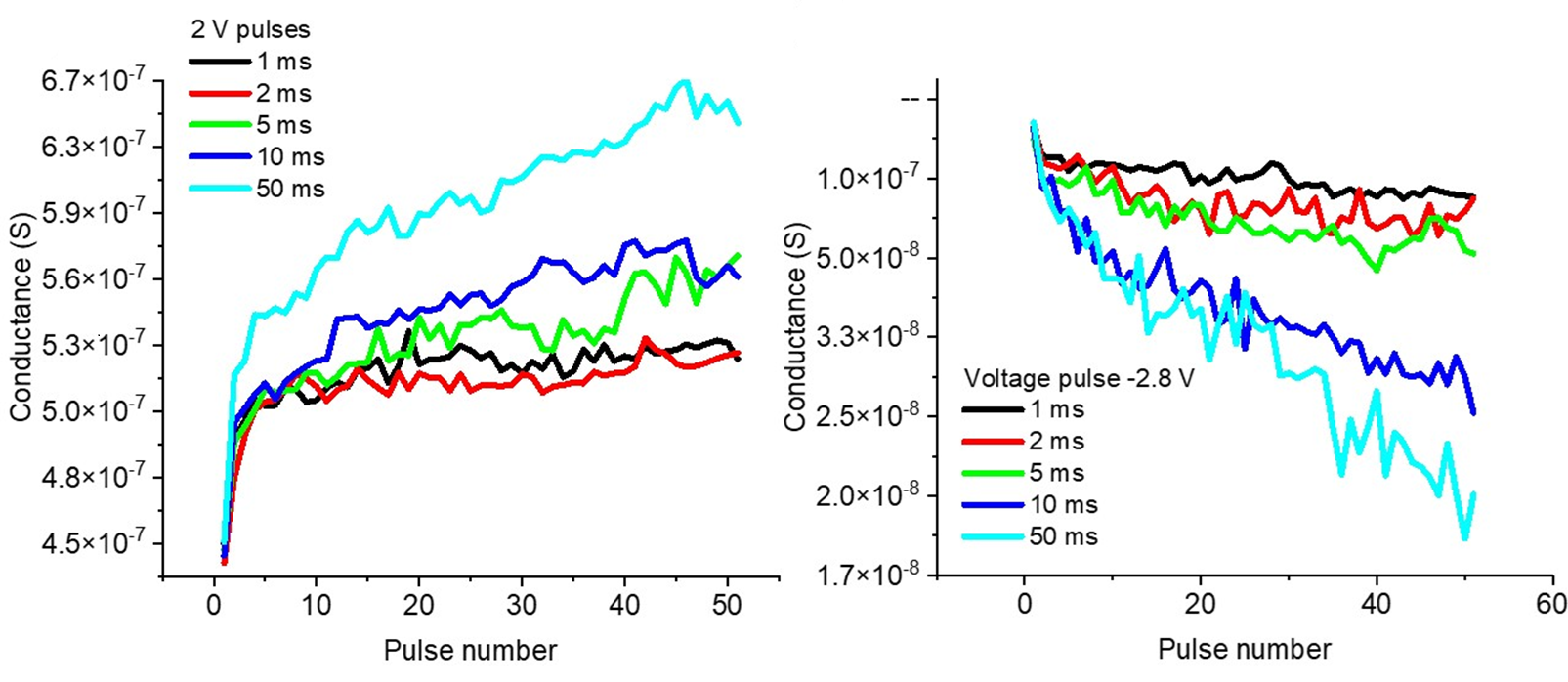
Figure 2.a: Conductance change as a function of the number of voltage pulses and pulse duration [1].

Figure 2.b: Training set of 4-bit patterns.
Training Algorithm
In the following section is described the mathematical algorithm used for the training of the neural network.
As I introduced before, the memristive crossbar has been used to implement a single-layer perceptron with 4 inputs and 2 outputs.
In particular, the outputs are calculated as nonlinear activation functions:
of the vector-by-matrix product components:
In order to have more degrees of freedom during the training, the actual network logic currents are calculated as the differential output of two adjacent columns, while the synaptic weights are represented by the differential weigths of two adjacent columns, thus forming 2 neurons containing 2 columns each:
To update the weights, is used backpropagation with the Manhattan update rule:
At this point, if \(\Delta W_{ij} > 0\), synapse \(W_{ij}\) is potentiated sending a positive voltage pulse to \(G^+_{ij}\), on the contrary, if \(\Delta W_{ij} < 0\), synapse \(W_{ij}\) is depressed sending a positive voltage pulse to \(G^-_{ij}\) .
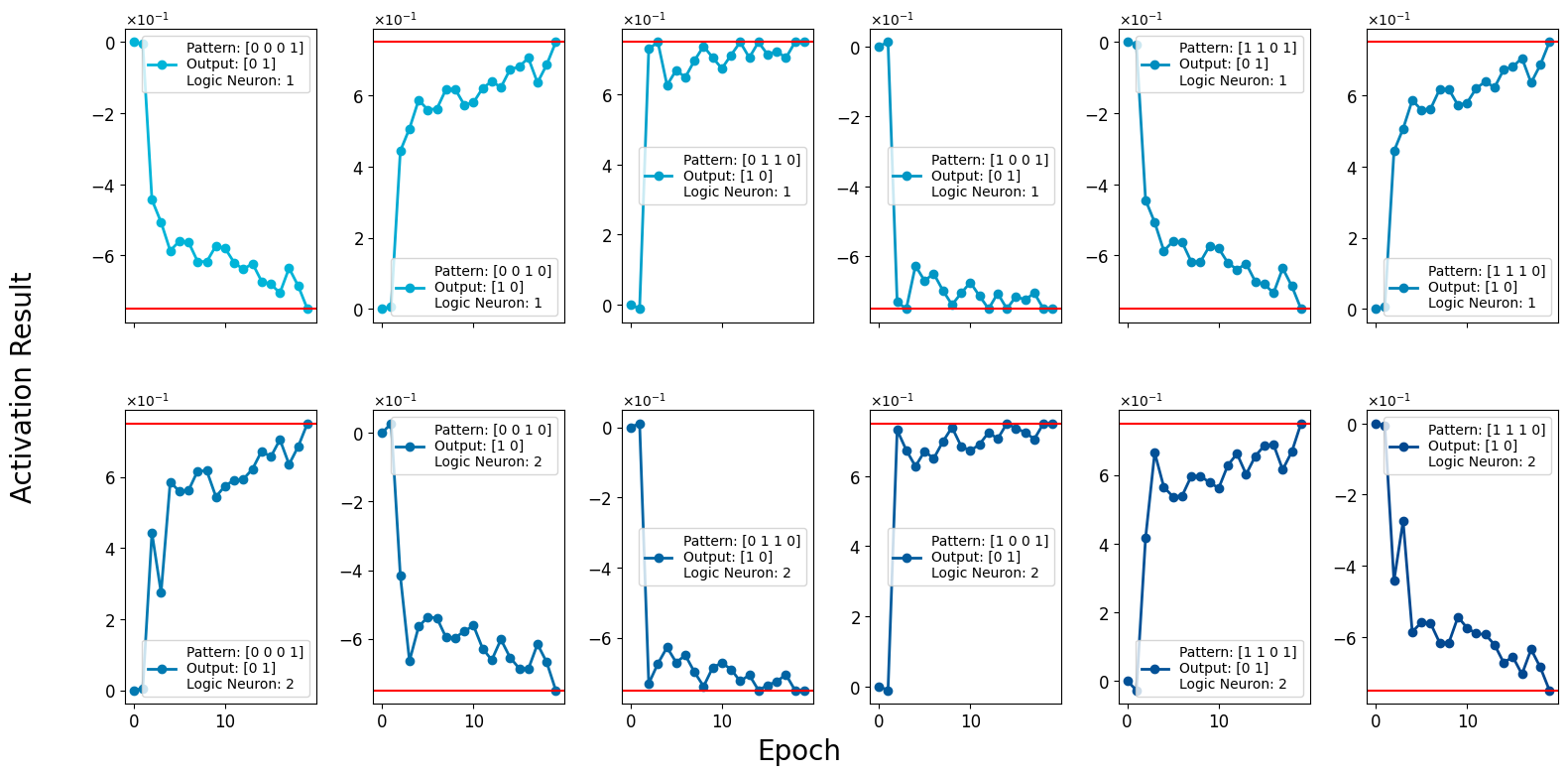
The parameters \(\beta\) and \(f^g_i(n)\) are numerical values that must be fine-tuned to achieve successful training. Specifically, \(f^g_i(n)\) represents the target value for the activation function. If the pattern is to be recognized by the neuron as output ‘1’, the activation function must exceed the target value \(f^g_i(n)\). Conversely, if the pattern is to be classified as output ‘0’, the activation function must remain below \(f^g_i(n)\).
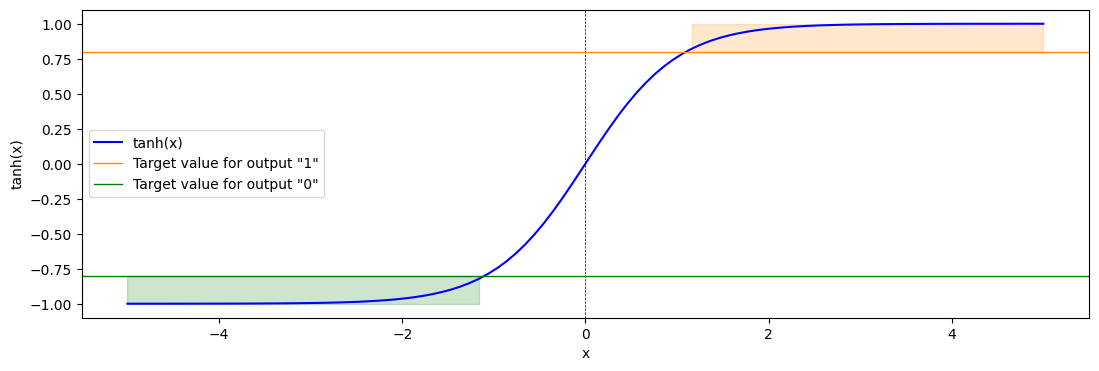
The neural network is considered successfully trained when the activation functions for all patterns lie within their respective target ranges. Additionally, in this implementation, the target values for outputs ‘1’ and ‘0’ are assumed to be the same for the entire set of patterns.
All these steps are summarized in the following picture [2]:

Python Simulation
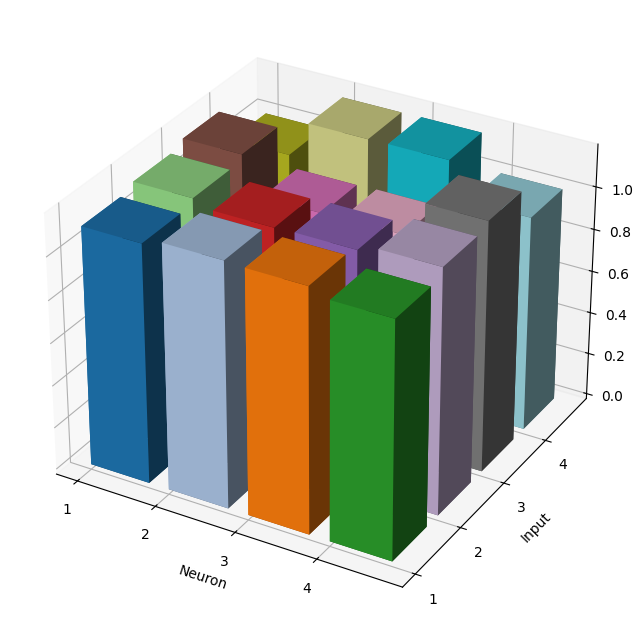
In this work, we present the implementation of a Python class that simulates the in-situ training process of a physical device. To replicate the role of synaptic depression and potentiation, the experimental dataset of conductances shown in Figure 2a (2V, 50ms) has been used. Additionally, to achieve a sufficient dynamic range and account for device-to-device variation, the conductances are initialized and updated as follows:
Where \(K\) is a multilication factor while \(shift_{ij}\) was obtained using a random lognormal distribution similar to that of the physical device.
Examples
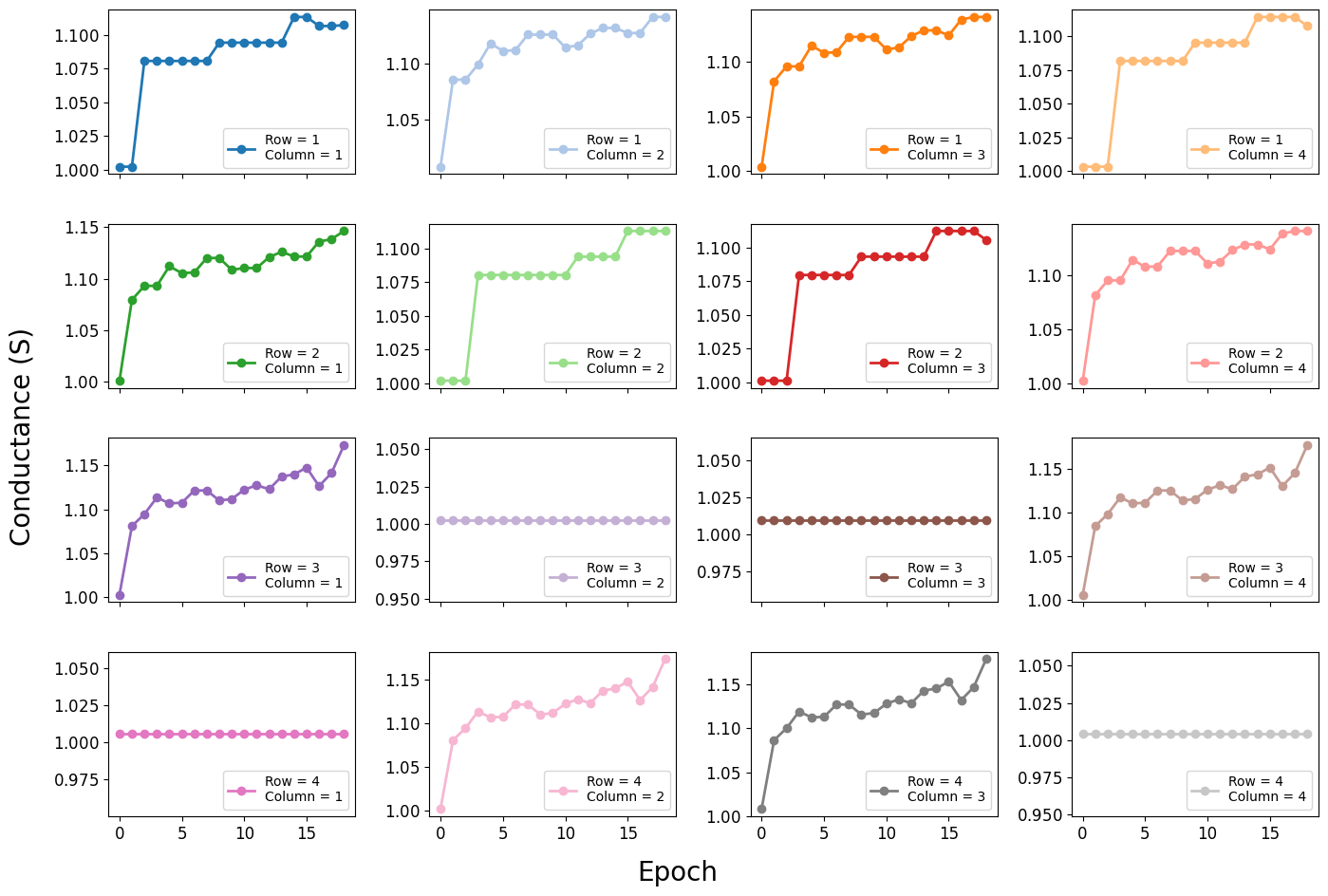
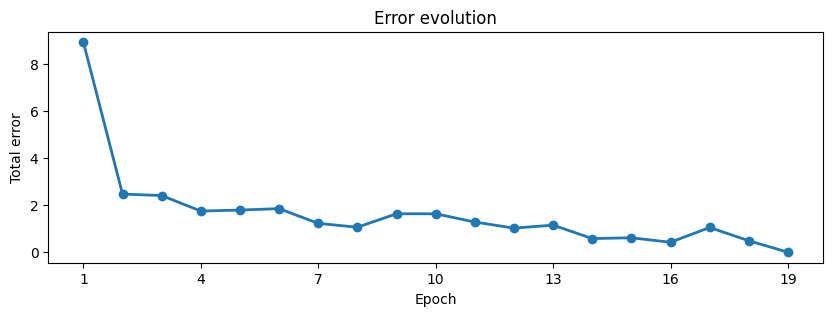
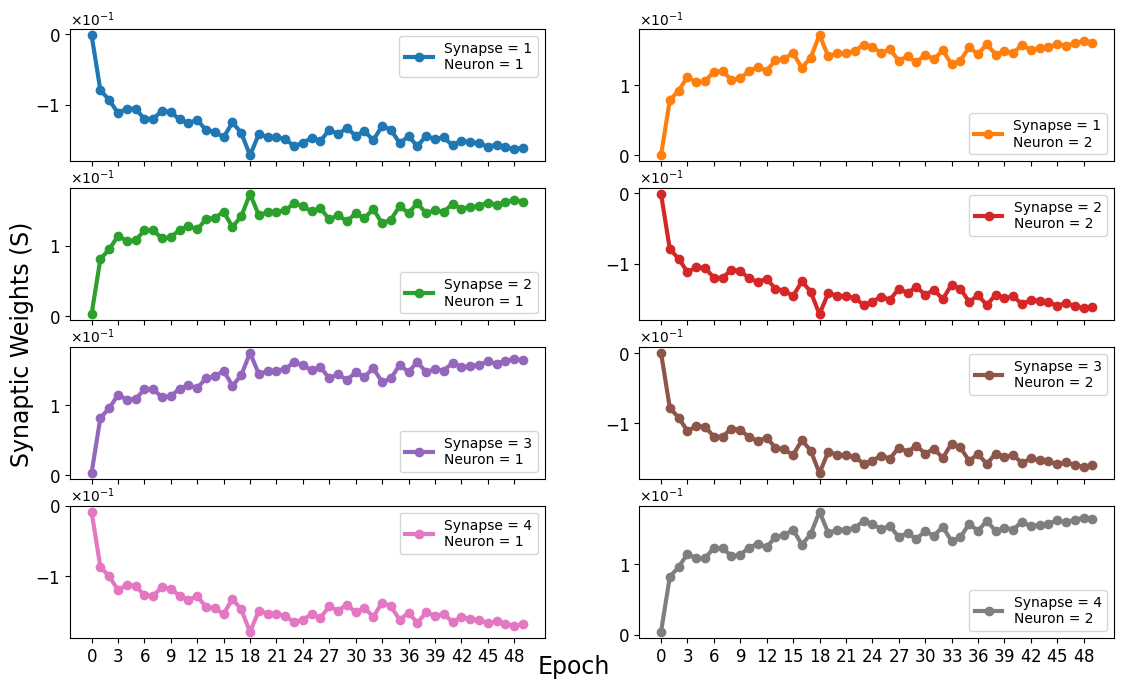
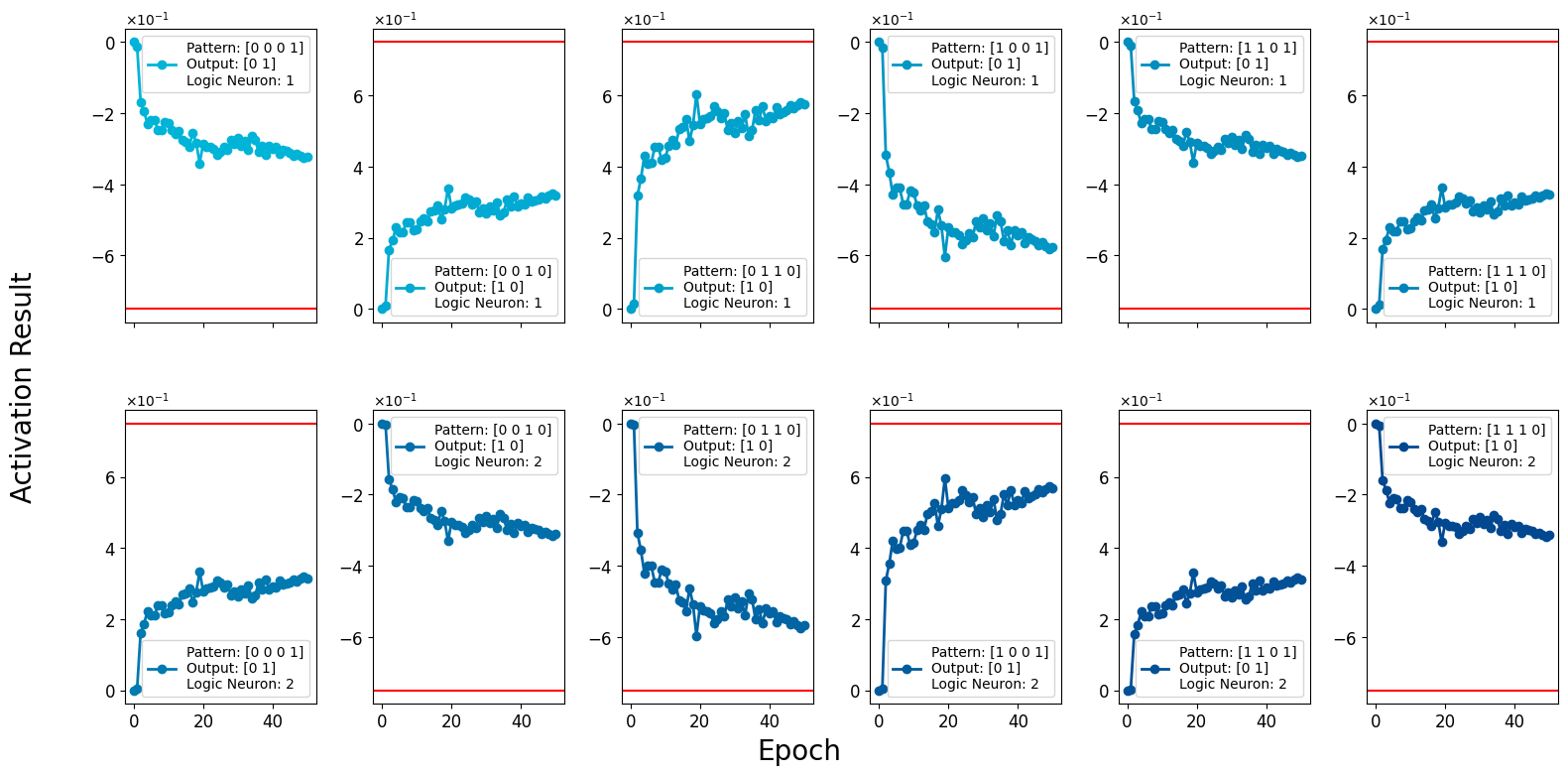
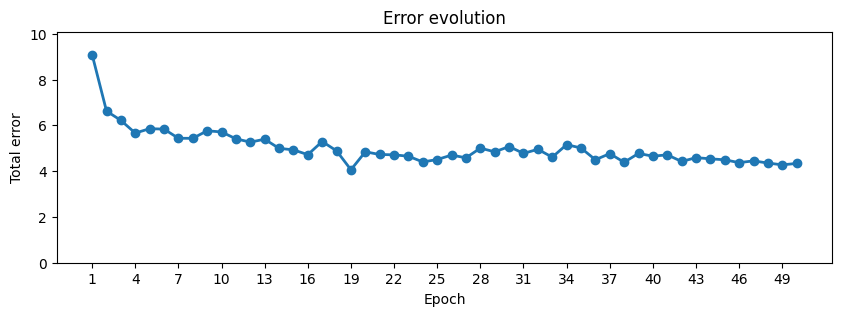
Below are examples of output graphs from a simulation that successfully converged after 18 epochs:
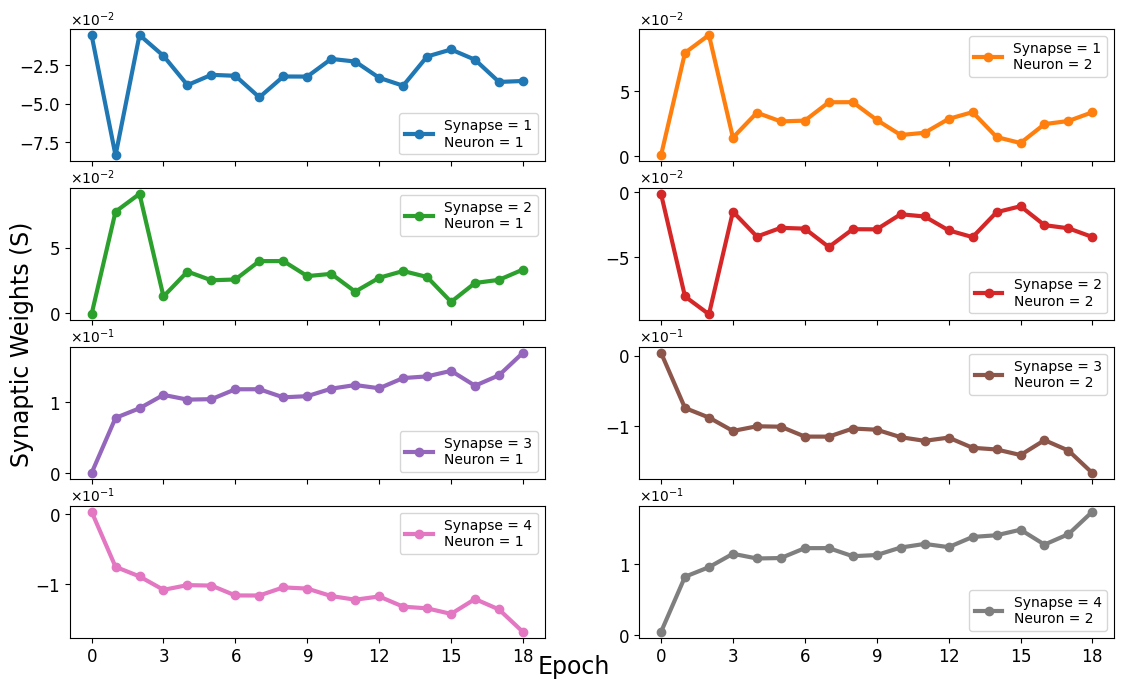
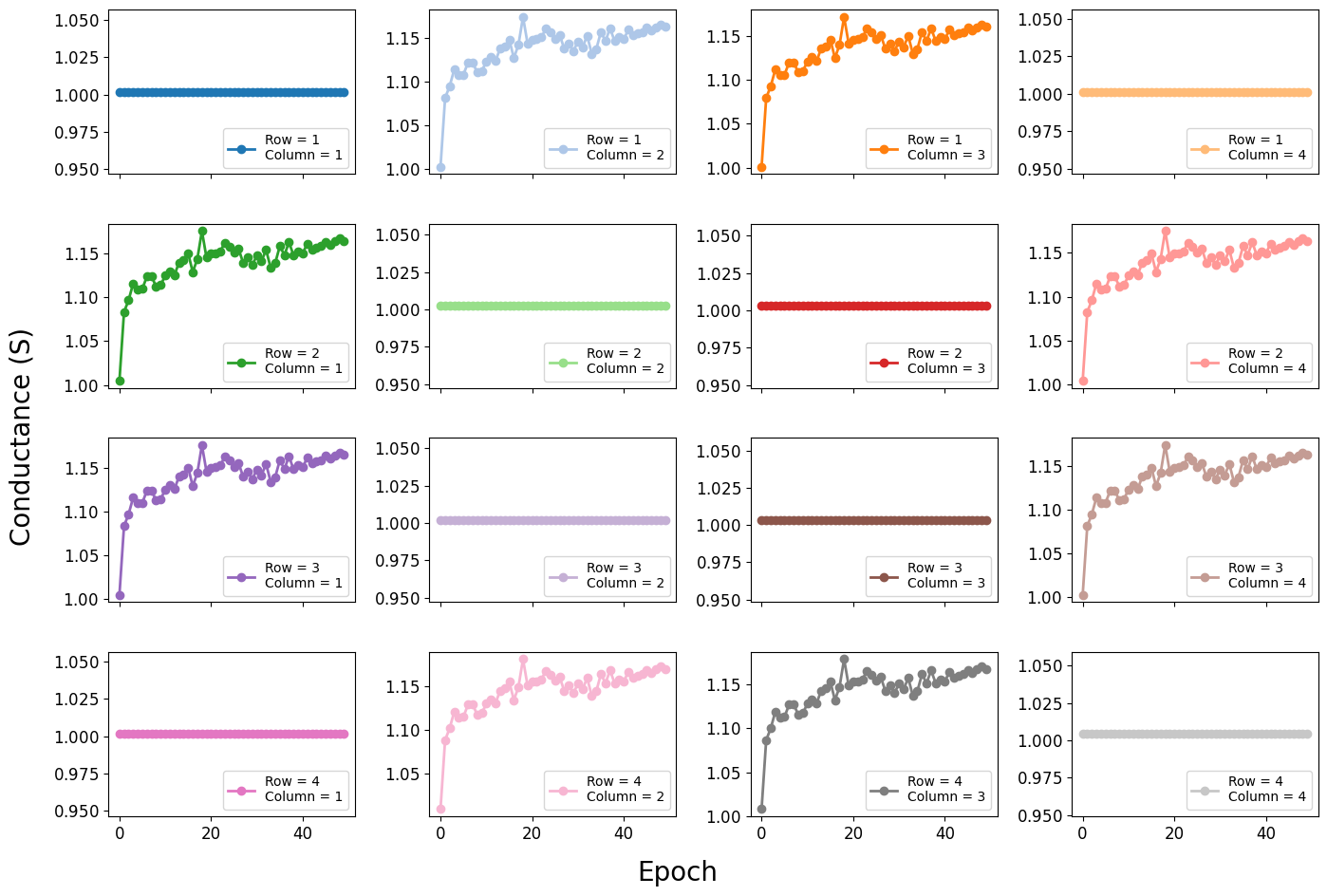
And here are examples from a simulation that did not converge after the default 48 epochs:
References
[1] Shumilin, A., Neha, P., Benini, M., Rakshit, R., Singh, M., Graziosi, P., … & Riminucci, A. (2024). Glassy Synaptic Time Dynamics in Molecular La0. 7Sr0. 3MnO3/Gaq3/AlOx/Co Spintronic Crossbar Devices. Advanced Electronic Materials, 2300887.
[2] Prezioso, M., Merrikh-Bayat, F., Hoskins, B. D., Adam, G. C., Likharev, K. K., & Strukov, D. B. (2015). Training and operation of an integrated neuromorphic network based on metal-oxide memristors. Nature, 521(7550), 61-64.